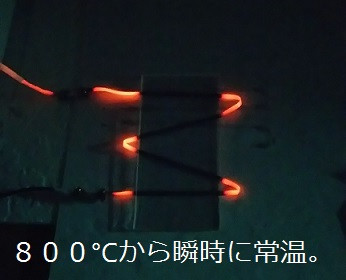
新型ヒーター素材の検証を行いました。
電源オンで瞬時に800℃に温度が上がり発熱するが、電源オフで瞬時に手で触れる常温に下がる特徴のバンドヒーターです。
瞬時に温度変化する不思議な新型ヒーター素材ですから、スターリングエンジンに使えるかもしれません。

新型ヒーター素材の検証を行いました。
電源オンで瞬時に800℃に温度が上がり発熱するが、電源オフで瞬時に手で触れる常温に下がる特徴のバンドヒーターです。
瞬時に温度変化する不思議な新型ヒーター素材ですから、スターリングエンジンに使えるかもしれません。


鶴岡高専の丹名誉教授から依頼され、新型クロスフロー風車の縮尺サイズの風洞実験機を製作しました。
回転する風車部分は、プラスチック板をヒートプレスした手作りで製作しました。
下部に設けてあるモーターで、クロスフロー風車の回転状況を観れます。
風洞実験後には、実物サイズで風力発電実証機を製作されておりました。
さらに、形状を変えて、マイクロ水力発電実証機にも応用されておりました。


地元コンクリートメーカー研究所様から依頼され、独自で開発製作し、特許出願となりました。
コンクリート製品の鉄筋締結作業に使用する、電気不要の手動工具です。
鉄筋工の腱鞘炎予防に役立つものです。
プラスチック板を張り合わせて創作したものですが、これで実際に鉄筋を締結してコンクリートを流し込み、実用性を証明しました。


メカニカル機構とモーター1個だけで歩く2足歩行の実証実験ロボットです。
地元の発明の会で発表して、大手メーカーの開発設計者から評価していただきました。
神奈川サイエンスパークでMITのマーク博士(当時)と面談して写真を見せたらば、単純なメカ構造だけで2足歩行することに大変興味を持った様子でした。
このロボットは柱時計の振り子の原理を利用して、まあまあの自動バランス制御と重心の移動ができました。
1978年製(高校生時代に学校祭に展示)は、モーターが2個で動作し、バランス制御は手動のロボットを創り、その結論として、歩行原理とは水を入れた風船をボヨンボヨンと転がす様な運動ではないか?との考えになりました。
子供の頃の私は、足が不自由な方々にロボット技術で何かの役に立ちたいと考えて、10歳の頃から独学で2足歩行原理を探求して、それを具現化する縮尺型の2足歩行ロボット製作をしてきましたが、1999年頃で止めております。
母方の血族の栗本東明博士の研究者としてのDNAを、私は僅かに受け継いでるのかもしれません。